

新京报贝壳财经讯(记者罗亦丹)针对具身大模型“不好用”“不易用”“不通用”的特点,3月29日,智源研究院院长王仲远在2025中关村论坛“未来人工智能先锋论坛”上发布首个跨本体具身大小脑协作框架RoboOS与开源具身大脑RoboBrain,可实现跨场景多任务轻量化快速部署与跨本体协作,推动单机智能迈向群体智能,为构建具身智能开源统一生态加速场景应用提供底层技术支持。
目前,其可支持松灵双臂、睿尔曼单/双臂、智元人形、宇树人形等不同类型的具身本体。在视频演示中,操作人员展示了不同种类的机器人协作递送苹果和水果刀的情景。
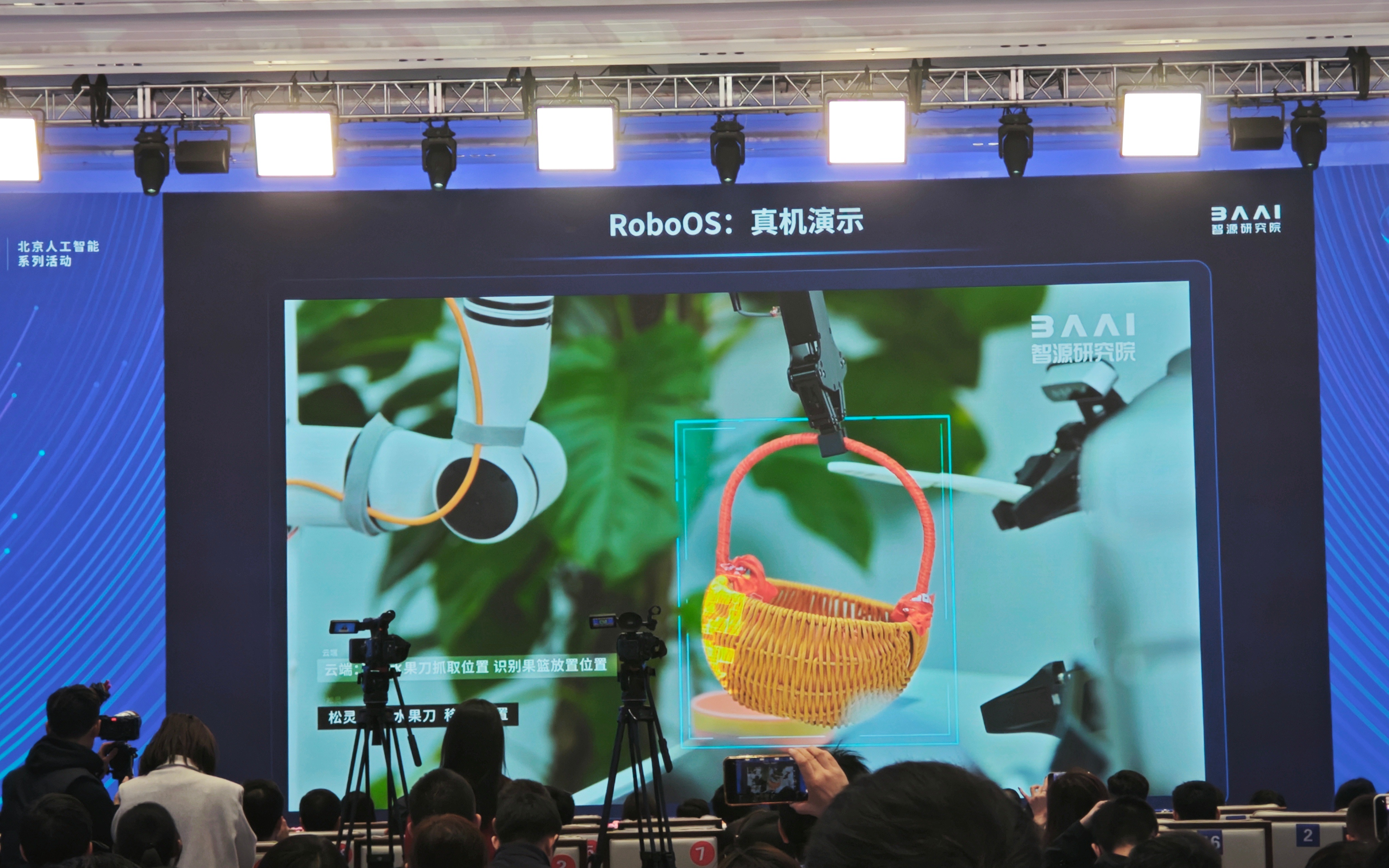
王仲远在中关村论坛现场进行视频演示 新京报贝壳财经记者罗亦丹/摄
在“递送苹果和水果刀”的任务场景中,整体任务流程是睿尔曼单臂机器人调用“导航技能”移动至餐桌前,宇树人形G1机器人调用“视觉抓取技能”完成指定物体的挑拣,睿尔曼调用“抓取技能”提起果篮并导航至松灵餐桌前。紧接着,松灵双臂机器人调用“抓取技能”获取水果刀,并放置在果篮中心,睿尔曼依据“空间记忆”导航至办公桌位置,递送果篮后返回待命。
而RoboOS接收“拿离杯子最近的水果,并递送一把水果刀”指令后,递送RoboBrain进行任务拆解,并将拆解后的子任务分发给3台跨本体机器人。RoboBrain通过 “空间记忆” 感知环境,确定果篮、苹果位置,并拆解任务为“宇树G1挑拣苹果→睿尔曼传递果篮→松灵机器人抓取水果刀→睿尔曼返回”。
各机器人本体执行子任务过程中,由RoboOS提供端云协作能力,将任务规划为技能粒度,实现云端RoboBrain分发规划,端侧执行技能并实时反馈。RoboBrain识别“离杯子最近的水果位置”“果篮抓取位置affordance”“水果刀抓取位置affordance”“果篮空闲位置Pointing”,经由RoboOS递送指导各机器人本体完成任务。
王仲远表示,RoboBrain模型、数据、代码全开源,他邀请各具身智能公司试用,为智能硬件产品注入智慧内核。
编辑 徐倩
校对 张彦君




