


新京报快讯(记者 张璐 见习记者 张建林)今年的世界机器人大会迎来一件重磅展品——月球采样机械臂。这台仪器曾在去年12月实现全球首次月面无人多点多次的选择性采样,并获取1.5kg月壤样品,采集量居世界第一。这项关键性技术也达到了国际领先水平。
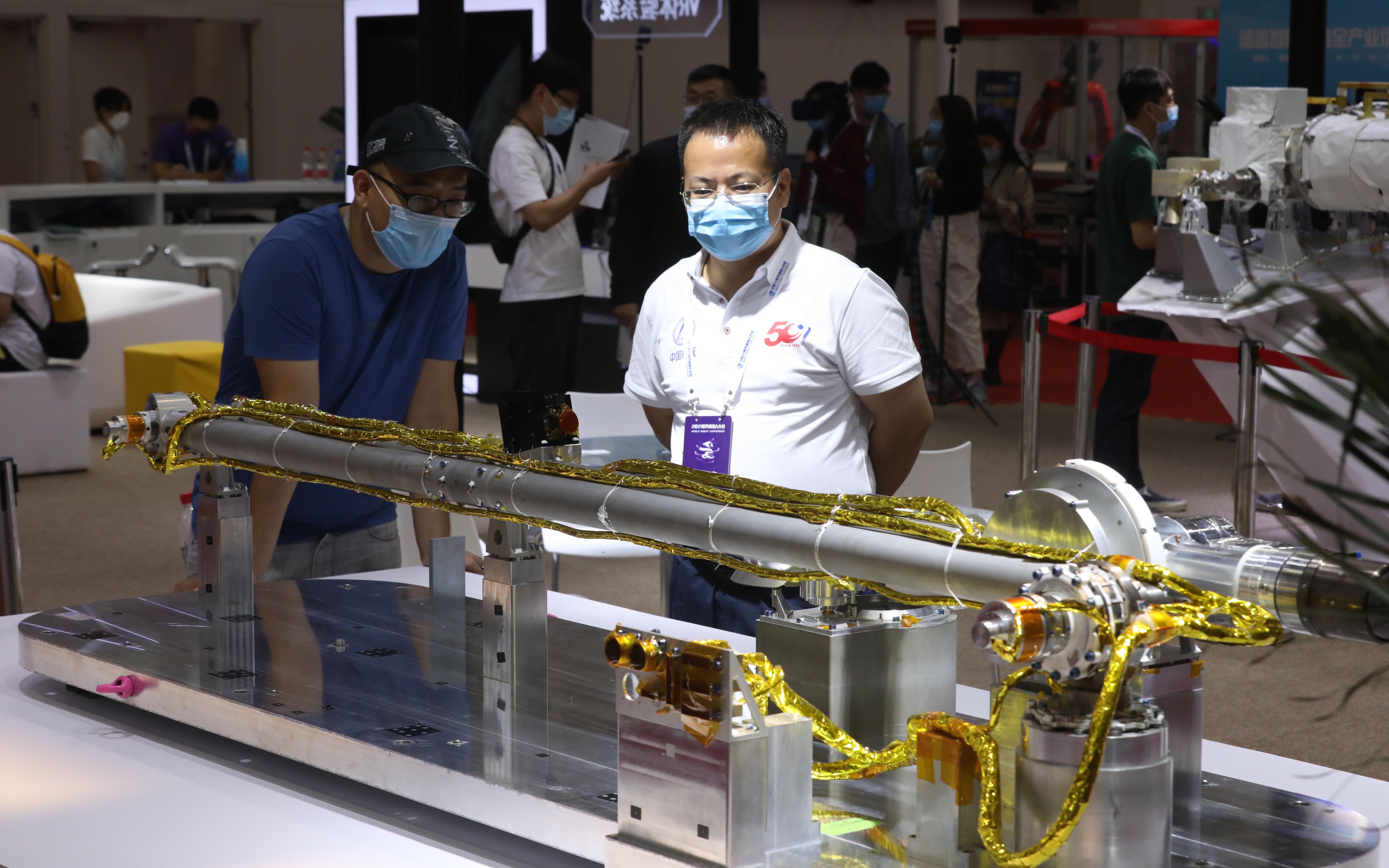
月球采样机械臂。新京报记者 王嘉宁 摄
虽然躺在展桌上没有“舒展”开,但仔细观察,记者发现,月球采样机械臂有两根类似人手臂大小的臂杆,小臂杆上安装了摄像头,机械臂末端的两侧有两个类似铲子或带钩状的铁锹采集器。嫦娥五号月球采样机械臂主任设计师姜水清介绍,机械臂安装在着陆器的顶板上,展开共有4.3米长。
在月球“抓土”并不容易,中国空间技术研究院相关工作人员介绍,月球采样机械臂攻克了月面无人自主采样与样品抓取转移、大负载/高精度/轻量化设计、复杂光照背景高精度视觉测量、地月大延时协同控制技术等空间机器人技术领域难题,具备铲、挖、浅钻、吸纳等多形式采样能力,是我国首个实际工程应用、具有完全自主知识产权的空间智能机械臂。
姜水清说,机械臂的研发难度在于任务的环境是未知的,要真正处在月球着陆区的采样地点,才能知道这个区域的地形地貌,月壤到底是密实还是疏松。“机械臂功耗、传感、重量等都是受限的。”他说,机械臂的重量受限,就无法像工业机器人一样粗壮,可用的传感器也比较少。同时,机械臂还需要能承受力、热、真空、辐射等复杂空间环境。
为此,设计师研究并制作了模拟月壤,分为三种状态,验证机械臂的采样能力。“一是标称月壤,就是着陆区可能存在的月壤,同时考虑到任务的可靠性,我们还设计了挑战月壤和极限月壤,取样难度依次递增。” 姜水清说,极限月壤最密实,成年男性踩在上面都没有痕迹。
机械臂为何不能在大会现场展示取样过程?姜水清表示,一个物体在月球上的重力为地球上的六分之一,在地球上,机械臂像一只胳膊一样,如果伸展开来,对其“肩关节”的负载太大。
“我们在地面测试验证时,设计人员使用1/6重力的补偿装置,防止机械臂负载过大。嫦娥五号采样机械臂采用气球吊挂的方式,抵消一部分地球重力。而地面采样验证则有专门场所,可以模拟月面采样区地形等环境。”姜水清介绍。
新京报记者 张璐 见习记者 张建林
摄影记者 王嘉宁
编辑 白爽 校对 李立军







